
- Weight: 21kg
- Top speed: 27m/s (60 mph)
- Size: 1m long, 0.6m wide, 0.4m high
- Standard operating team: 2-3 people
Chassis
- Derived from 1:5 scale RC truck
- Off-the-shelf chassis modifications to support payload
- Custom 3D printed mounts and enclosures
- 4s 6500mAh battery pair give typical run time of 1 hour, full-load run time 15 min
- Seamless switching between autonomous and manual control using RC transmitter
- Remote run stop disables motion in manual and autonomous modes
Sensor Suite
- High-precision IMU, raw data up to 1KHz
- RTK-corrected GPS, position at 20Hz
- Hall-effect rotation sensor on each wheel at 70Hz
- 2 front facing machine vision cameras, 1280x1024, 70fps, global shutter, synchronously triggered

Computing (Mini-ITX)
- Intel Skylake Quad-core i7
- 32GB DDR4 RAM
- 512GB m.2 SSD
- 1TB SATA3 SSD
- Nvidia GTX 750ti GPU
- WiFi and XBee communication
- 6s 11000mAh battery gives typical run time of 3 hours, full-load run time 1 hour
- DC power supply
- Dynamically switching power selection between internal battery and external power
- Robust fabricated aluminum enclosure protects sensitive electronics from shock
- Standardized mounting and communication interface to chassis
Software
- ROS-compatible, open-source core code
- State estimation by fusing IMU and GPS using GTSAM optimization toolbox
- Flexible launch system to pair any compute box with any chassis
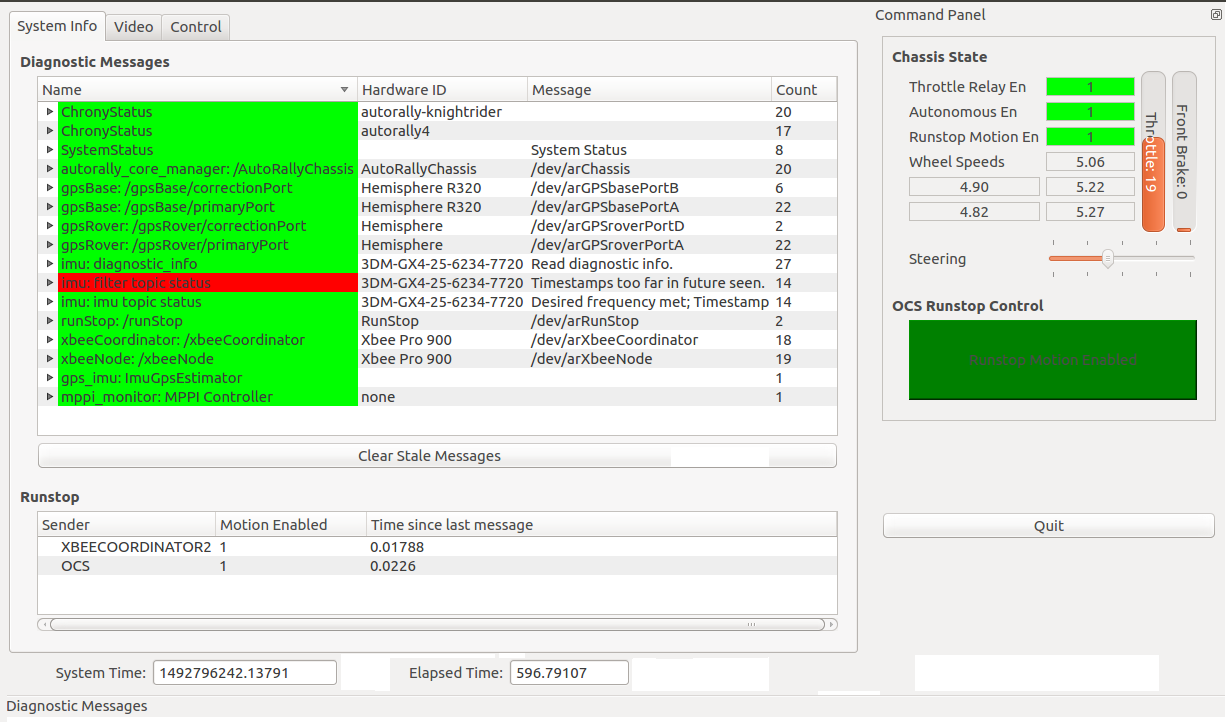
- Operator Control Station (OCS) for remote monitoring
- GPS waypoint steering controller
- Constant velocity controller
Simulation
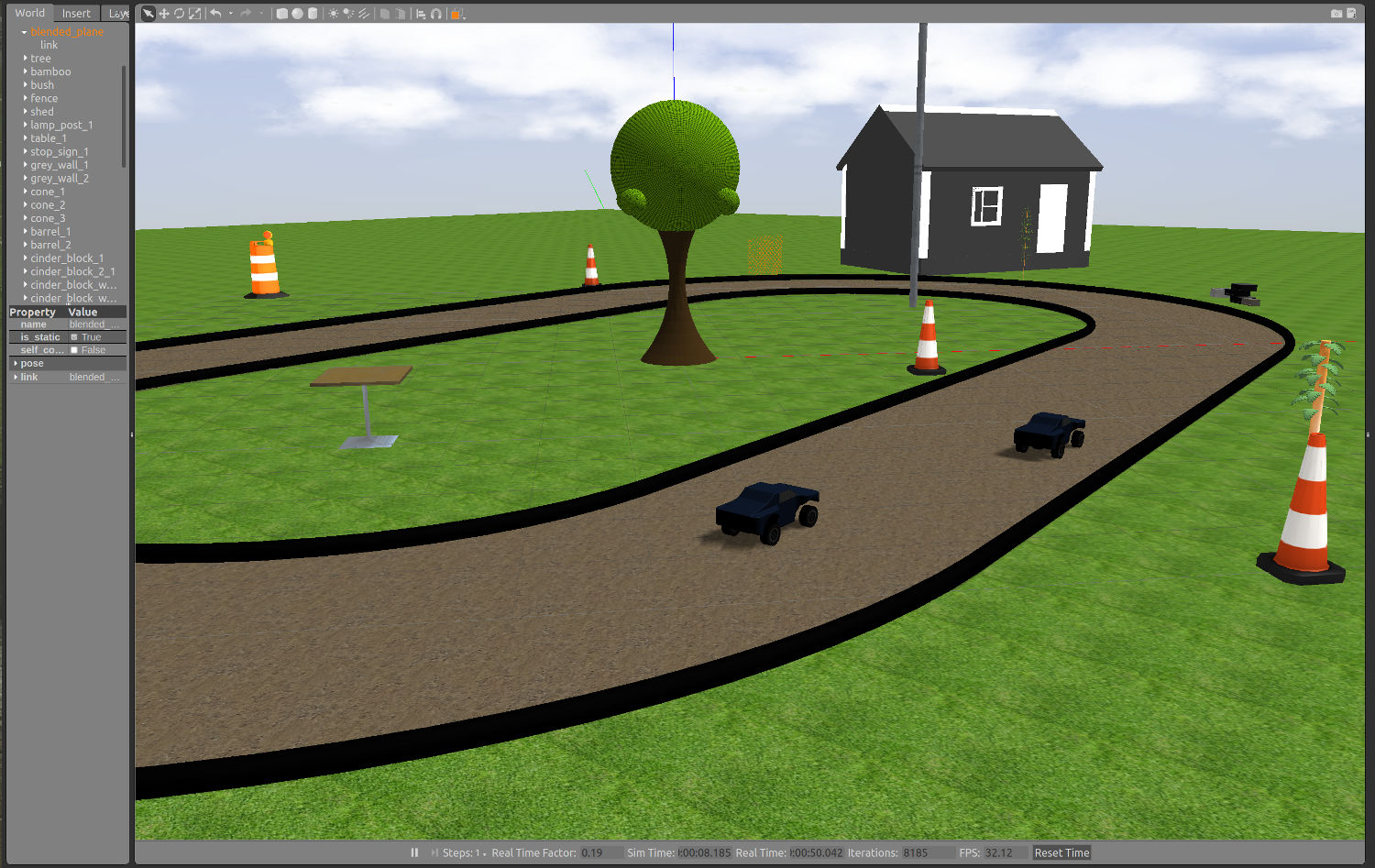
- Gazebo-based
- Identical ROS interface as physical robot
- Vehicle model parameters measured from physical robot